Hyundai Ioniq (AE): Hybrid Motor Control System / Motor Control Unit(MCU). Schematic diagrams
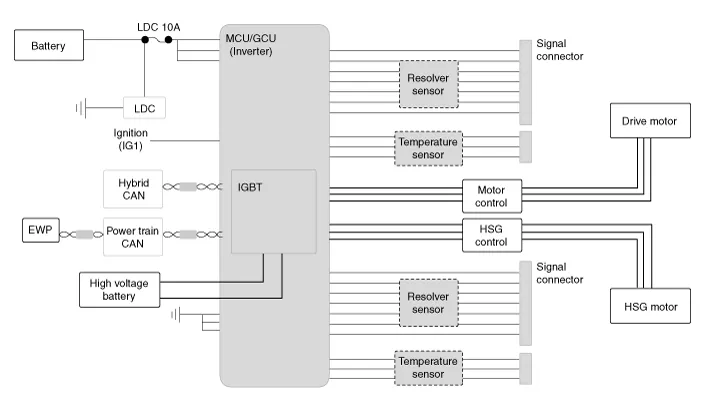
| Diagram System Circuit |
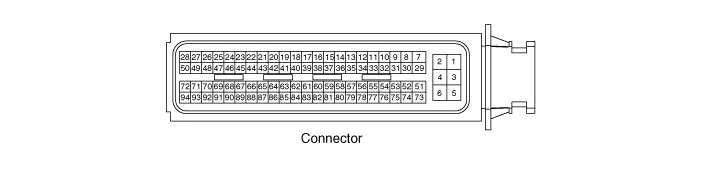
| MCU terminal input/output signal connector |
| Functions of MCU Terminal |
|
Terminal
|
Signal
|
Usage
|
| 5 | VB1 | Constant power (B+) |
| 6 | VB2 | Constant power (B+) |
| 3 | GND1 | Power ground |
| 4 | VB3 | Constant power (B+) |
| 1 | GND2 | Power ground |
| 2 | GND3 | Power ground |
| 73 | IGN | Ignition |
| 74 | - | |
| 75 | L_CAN_H | C_CAN_[High] |
| 76 | L_CAN_L | C_CAN_[Low] |
| 77 | - | |
| 78 | P_CAN_H | P - CAN [High] |
| 79 | P_CAN_L | P - CAN [Low] |
| 80 | - | |
| 81 | H_CAN_H | H - CAN [High] |
| 82 | H_CAN_L | H - CAN [Low] |
| 83 | - | |
| 84 | - | |
| 85 | - | |
| 86 | - | |
| 87 | H_REZ+ | HSG resolver (+) power |
| 88 | H_REZ- | HSG resolver (-) power |
| 89 | - | |
| 90 | - | |
| 91 | - | |
| 92 | - | |
| 93 | M_REZ+ | Motor resolver (+) power |
| 94 | M_REZ- | Motor resolver (-) power |
| 51 | - | |
| 52 | - | |
| 53 | - | |
| 54 | - | |
| 55 | - | |
| 56 | - | |
| 57 | - | |
| 58 | - | |
| 59 | - | |
| 60 | - | |
| 61 | - | |
| 62 | H_REZS1 | HSG resolver sensor (S1) input signal |
| 63 | H_REZS3 | HSG resolver sensor (S3) input signal |
| 64 | H_REZS2 | HSG resolver sensor (S2) input signal |
| 65 | H_REZS4 | HSG resolver sensor (S4) input signal |
| 66 | H_REZ_S | SHEILD |
| 67 | - | |
| 68 | M_REZS1 | Motor resolver sensor (S1) input signal |
| 69 | M_REZS3 | Motor resolver sensor (S3) input signal |
| 70 | M_REZS2 | Motor resolver sensor (S2) input signal |
| 71 | M_REZS4 | Motor resolver sensor (S4) input signal |
| 72 | M_REZ_S | SHEILD |
| 29 | - | |
| 30 | - | |
| 31 | ||
| 32 | ||
| 33 | ||
| 34 | ||
| 35 | - | |
| 36 | ||
| 37 | ||
| 38 | START_SIGNAL | Start signal input signal |
| 39 | - | |
| 40 | - | |
| 41 | - | |
| 42 | HSG_TM_GND | Sensor ground |
| 43 | HSG_TM | HSG temperature sensor input signal |
| 44 | HSG_TM_S | SHEILD |
| 45 | - | |
| 46 | - | |
| 47 | - | |
| 48 | MOT_TM_GND | Sensor ground |
| 49 | MOT_TM | Motor temperature sensor input signal |
| 50 | MOT_TM_S | SHEILD |
| 7 | - | |
| 8 | - | |
| 9 | - | |
| 10 | - | |
| 11 | - | |
| 12 | - | |
| 13 | - | |
| 14 | - | |
| 15 | BRAKE_SW2 | Brake switch 2 input signal (NC, IG1) |
| 16 | BRAKE_SW1 | Brake switch 1 input signal (NO, B+) |
| 17 | ||
| 18 | ||
| 19 | ||
| 20 | ||
| 21 | ||
| 22 | ||
| 23 | ||
| 24 | ||
| 25 | ||
| 26 | ||
| 27 | ||
| 28 |
| MCU terminal input/output signal |
|
Terminal
|
Signal
|
Usage
|
Condition
|
Type
|
Level
|
Waveform
|
| 5 | VB1 | Constant power (B+) | Constant | DC Voltage | Battery Power |   |
| 6 | VB2 | Constant power (B+) | Constant | DC Voltage | Battery Power |   |
| 3 | GND1 | Power ground | Constant | DC Voltage | Max. 50 mV | |
| 4 | VB3 | Constant power (B+) | Constant | DC Voltage | Battery Power | |
| 1 | GND2 | Power ground | Constant | DC Voltage | Max. 50 mV | |
| 2 | GND3 | Power ground | Constant | DC Voltage | Max. 50 mV |   |
| 73 | IGN | Ignition | IG ON | DC Voltage | Battery Power |   |
| 74 | - | |||||
| 75 | L_CAN_H | C - CAN [High] | IG ON | Pulse | Dominant : 2.75 - 4.5 (3.5) V Recessive : 2.0 - 3.0 (2.5) V |
|
| 76 | L_CAN_L | C - CAN [Low] | IG ON | Pulse | Recessive : 2.0 - 3.0 (2.5) V Dominant : 0.5 - 2.25 (1.5) V | |
| 77 | - | |||||
| 78 | P_CAN_H | P - CAN [High] | IG ON | Pulse | Dominant : 2.75 - 4.5 (3.5) V Recessive : 2.0 - 3.0 (2.5) V |
|
| 79 | P_CAN_L | P - CAN [Low] | IG ON | Pulse | Recessive : 2.0 - 3.0 (2.5) V Dominant : 0.5 - 2.25 (1.5) V | |
| 80 | - |   |   |   |   | |
| 81 | H_CAN_H | H - CAN [High] | IG ON | Pulse | Dominant : 2.75 - 4.5 (3.5) V Recessive : 2.0 - 3.0 (2.5) V |
|
| 82 | H_CAN_L | H - CAN [Low] | IG ON | Pulse | Recessive : 2.0 - 3.0 (2.5) V Dominant : 0.5 - 2.25 (1.5) V | |
| 83 | - |   | ||||
| 84 | - |   | ||||
| 85 | - | |||||
| 86 | - | |||||
| 87 | H_REZ+ | HSG resolver (+) power | IG ON | Differential, Analog | 14 Vpp sine wave |
|
| 88 | H_REZ- | HSG resolver (-) power | ||||
| 89 | - |   |   |   |   | |
| 90 | - | |||||
| 91 | - |   | ||||
| 92 | - |   | ||||
| 93 | M_REZ+ | Motor resolver (+) power | IG ON | Differential, Analog | 14 Vpp sine wave |
|
| 94 | M_REZ- | Motor resolver (-) power | ||||
| 51 | - |   |   |   |   | |
| 52 | - |   |   |   |   | |
| 53 | - |   |   |   |   | |
| 54 | - | |||||
| 55 | - |   | ||||
| 56 | - |   | ||||
| 57 | - |   | ||||
| 58 | - |   | ||||
| 59 | - |   | ||||
| 60 | - |   | ||||
| 61 | - |   |   |   |   | |
| 62 | H_REZS1 | HSG resolver sensor (S1) input signal | IG ON | Differential, Analog | 0 - 3 Vpp sine wave |
|
| 63 | H_REZS3 | HSG resolver sensor (S3) input signal | ||||
| 64 | H_REZS2 | HSG resolver sensor (S2) input signal | IG ON | Differential, Analog | 0 - 3 Vpp sine wave |
|
| 65 | H_REZS4 | HSG resolver sensor (S4) input signal | ||||
| 66 | H_REZ_S | SHEILD | Constant | DC Voltage | Max. 50 mV | |
| 67 | - | |||||
| 68 | M_REZS1 | Motor resolver sensor (S1) input signal | IG ON | Differential, Analog | 0 - 3 Vpp sine wave |
|
| 69 | M_REZS3 | Motor resolver sensor (S3) input signal | ||||
| 70 | M_REZS2 | Motor resolver sensor (S2) input signal | IG ON | Differential, Analog | 0 - 3 Vpp sine wave |
|
| 71 | M_REZS4 | Motor resolver sensor (S4) input signal | ||||
| 72 | M_REZ_S | SHEILD | Constant | DC Voltage | Max. 50 mV | |
| 29 | - | |||||
| 30 | - | |||||
| 31 | ||||||
| 32 | ||||||
| 33 | ||||||
| 34 | ||||||
| 35 | - | |||||
| 36 | ||||||
| 37 | ||||||
| 38 | START_SIGNAL | Start signal input signal | IG ST | DC Voltage | Battery voltage | |
| 39 | - | |||||
| 40 | - | |||||
| 41 | - | |||||
| 42 | HSG_TM_GND | Sensor ground | Constant | DC Voltage | Max. 50 mV | |
| 43 | HSG_TM | HSG temperature sensor input signal | IG ON | Analog | 0 - 5V | |
| 44 | HSG_TM_S | SHEILD | Constant | DC Voltage | Max. 50 mV | |
| 45 | - | |||||
| 46 | - | |||||
| 47 | - | |||||
| 48 | MOT_TM_GND | Sensor ground | Constant | DC Voltage | Max. 50 mV | |
| 49 | MOT_TM | Motor temperature sensor input signal | IG ON | Analog | 0 - 5V | |
| 50 | MOT_TM_S | SHEILD | Constant | DC Voltage | Max. 50 mV | |
| 7 | - | |||||
| 8 | - | |||||
| 9 | - | |||||
| 10 | - | |||||
| 11 | - | |||||
| 12 | - | |||||
| 13 | - | |||||
| 14 | - | |||||
| 15 | BRAKE_SW2 | Brake switch 2 input signal (NC, IG1) | IG ON | DC Voltage | Battery voltage | |
| 16 | BRAKE_SW1 | Brake switch 1 input signal (NO, B+) | Constant | DC Voltage | Battery voltage | |
| 17 | ||||||
| 18 | ||||||
| 19 | ||||||
| 20 | ||||||
| 21 | ||||||
| 22 | ||||||
| 23 | ||||||
| 24 | ||||||
| 25 | ||||||
| 26 | ||||||
| 27 | ||||||
| 28 |

Component location1. HPCU (Hybrid Power Control Unit)(LDC+MCU+HCU+Reservoir)2. Hybrid drive motor3. Hybrid starter generator (HSG)4. Electrical radiator5.
Removal • MCU is integrated with HPCU. Therefore, to install / remove the MCU, follow the procedure for installing / removing the HPCU.
Other information:
Hyundai Ioniq (AE) 2017-2022 Service & Repair Manual: Description and operation
DescriptionRear corner radar is a system that uses two magnetic wave radar sensors attached on the rear panel to measure the distance from the following vehicles and provides the sensing and (visual and auditory) alarm of any vehicle coming into the blind spot.
Hyundai Ioniq (AE) 2017-2022 Service & Repair Manual: Description and operation
Cruise ControlThe cruise control system is engaged by the cruise "ON/OFF" main switch located on right of steering wheel column. The system has the capability to cruise, coast, accelerate and resume speed.It also has a safety interrupt, engaged upon depressing brake or shifting select lever.
Categories
- Manuals Home
- Hyundai Ioniq Owners Manual
- Hyundai Ioniq Service Manual
- Transmission Gear Oil. Repair procedures
- AVN(Audio Video Navigation) head unit. Components and components location
- Suspension System
- New on site
- Most important about car
