Hyundai Ioniq (AE): Air Conditioning System / A/C Pressure Transducer. Repair procedures
Hyundai Ioniq (AE) 2017-2022 Service & Repair Manual / Heating, Ventilation and Air Conditioning / Air Conditioning System / A/C Pressure Transducer. Repair procedures
| Inspection |
|

| 1. | Turn the ignition switch OFF. |
| 2. | Install the refrigerant recovery/recycling/charging system. (Refer to Air Conditioning System - "Repair procedures") |
| 3. | Turn ON the ignition switch, put into operation the air conditioner. |
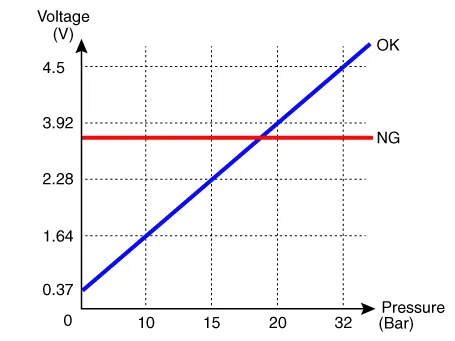
| 4. | Calculate the reference voltage of the Recovery/Recycle/Recharge machine high pressure value using the formula below.
|
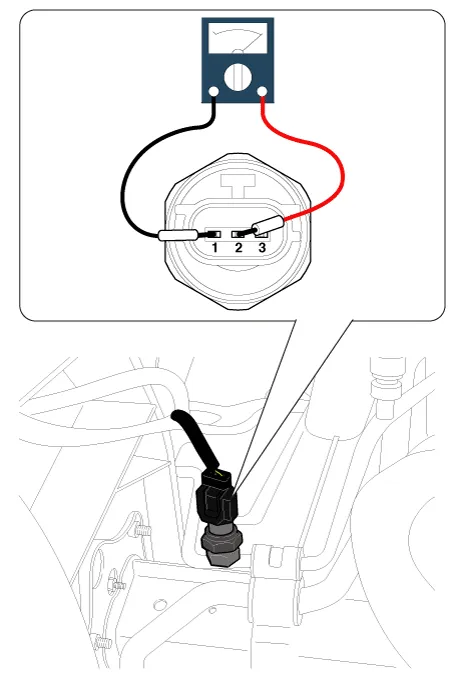
| 5. | Measure the sensor output voltage between terminal "1" and "2".
|
| 6. | If the reference voltage value and the sensor output voltage value are close to each other, the air conditioner pressure transducer is normal. |
| 7. | If 0V is output or the reference voltage value and sensor output voltage value are not close to each other, replace the air conditioner pressure transducer.
|

| Replacement |
| 1. | Disconnect the negative (-) battery terminal. |
| 2. | Recover the refrigerant with a recovery/charging station.
|

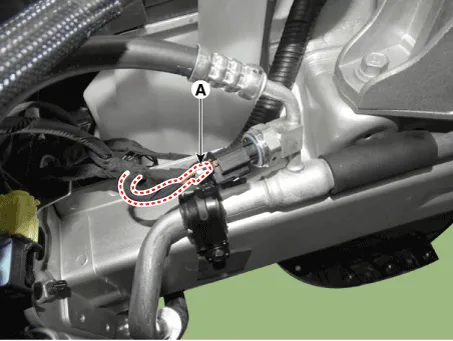
| 3. | Disconnect the A/C pressure transducer connector (A).
|
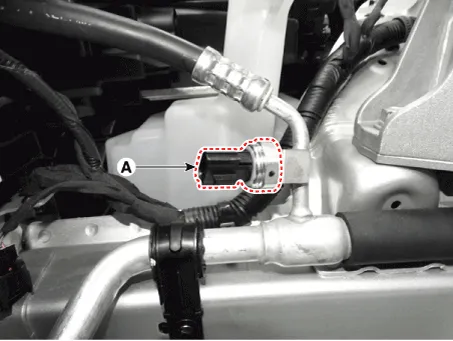
| 4. | Remove the A/C pressure transducer (A).
|

| 5. | To install, reverse the removal procedure.
|
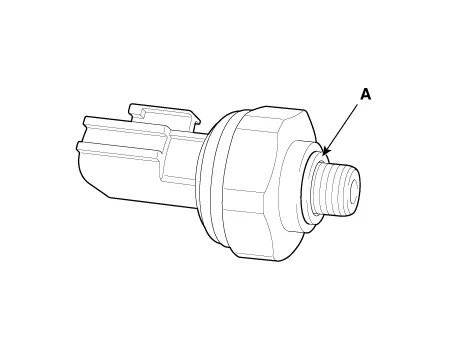
DescriptionThe A/C Pressure Transducer (APT) converts the pressure value of high pressure line into voltage value after measuring it. By converted voltage value, engine ECU controls the cooling fan by operating it high speed or low speed.
DescriptionThe evaporator temperature sensor will detect the evaporator core temperature and interrupt compressor relay power in order to prevent evaporator from freezing by excessive cooling.
Other information:
Hyundai Ioniq (AE) 2017-2022 Service & Repair Manual: Components and components location
C
Hyundai Ioniq (AE) 2017-2022 Service & Repair Manual: Repair procedures
Diagnosis with GDS1.REAR CORENER RADAR system defects can be quickly diagnosed with the GDS. GDS operates actuator quickly to monitor, input/output value and self diagnosis.2.Connect the cable of GDS to the data link connector in driver side crash pad lower panel, turn the power on GDS.
Categories
- Manuals Home
- Hyundai Ioniq Owners Manual
- Hyundai Ioniq Service Manual
- DCT(Dual Clutch Transmission) System
- Hybrid Vehicle Engine Compartment
- Description and operation
- New on site
- Most important about car

Copyright © 2026 www.hioniqae.com - 0.0143